

 联系我们
联系我们

图片
2. 限位开关本意设计用来可以在机器人本体某些位置安装硬件开关电路,机器人走到限位位置,电路断开,控制器知道机器人到达限位位置,停止机器人运动
图片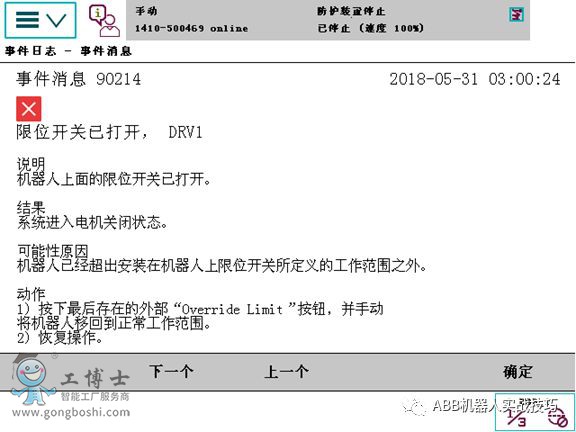
3. 本体限位开关位置在柜内左侧左下角的接触器版上的x21,外轴限位开关位置在柜内左侧左下角的接触器版上的x22,如下图
图片
图片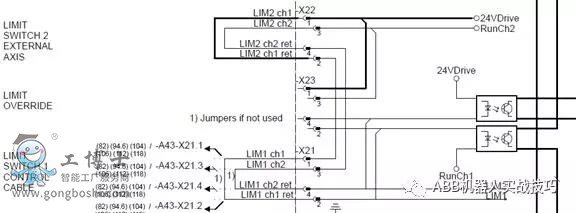
4. 出厂的时候x21的1和2,3和4短接,x22的1和2,3和4短接,或者按照上图在机器人本体端短接
5. 现场如果报限位开关打开,也可以临时短接x23的1和2,3和4.如上图,
X23一旦短接,即绕开了x21和x22,此时就算x21和x22有问题,机器人也不会报限位开关打开错误。
- 下一篇:紧凑柜急停接线
- 上一篇:机械手存储器数据差异错误处理
