

 联系我们
联系我们

图片
2)依次检查机器人线缆
3)也可以修改参数如下:(伺服焊***加压时也会检查机器人位置,但焊***形变会导致机器人位置与设置有偏差,该报错可能原因为设置的误差过小)
4)控制面板-配置-主题-motion-supervisiontype,找到对应轴,修改Max Force Control Position Error(0.03为30mm),可设范围0-0.2
图片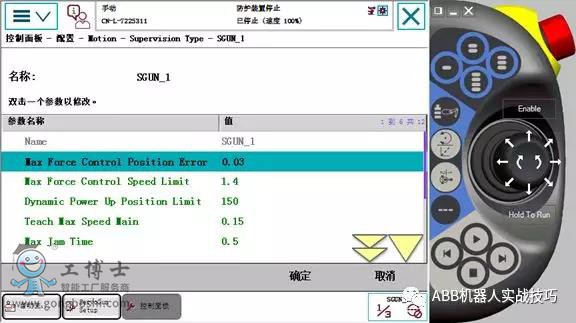
联系热线:18616260662 联系人:王青慧 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 ABB机器人|工业机器人培训编程
